 https://www.autorotorgroup.com/wp-content/uploads/2020/10/LM1.2.jpg
369
569
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-10-23 12:53:562022-12-19 11:50:15LM1
https://www.autorotorgroup.com/wp-content/uploads/2020/10/LM1.2.jpg
369
569
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-10-23 12:53:562022-12-19 11:50:15LM1Manipulatoren
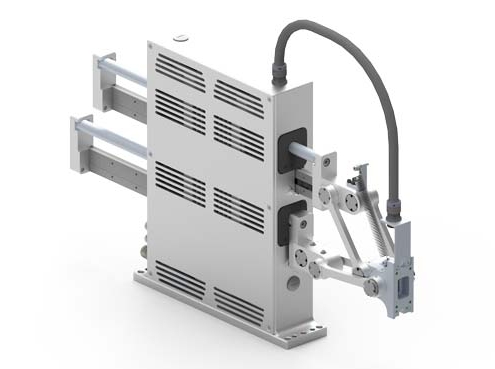
Systeme zur Bewegung von Teilen, deren Masse üblicherweise beschränkt ist. Diese Teile werden zwischen vorgegebenen Punkten übertragen. Die geordnete Reihe der Bewegungen ermöglicht eine Vielzahl von Pick-and-Place-Verfahren mit genauen und zarten Verlagerungen ohne Schwingungen, auch mit hoher Geschwindigkeit. Die Manipulatoren können mechanisch (mit Nocken) oder elektronisch (mit Linearmotor) sein und lineare und winklige Bewegungen durchführen. Hohe Wiederholbarkeit, Festigkeit, niedrigste installierte Antriebskraft und wenige Wartung sind die Merkmale der Manipulatoren Autorotor, die die Benutzung des Systems vereinfachen. Außerdem ermöglichen sie die mechanische Synchronisierung des Maschinenzyklus.
https://www.autorotorgroup.com/wp-content/uploads/2020/10/LM1.2.jpg
369
569
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-10-23 12:53:562022-12-19 11:50:15LM1 https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRMT2.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:16:332021-04-29 17:06:19BRMT2
https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRMT2.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:16:332021-04-29 17:06:19BRMT2 https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRMT3.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:15:462021-04-29 17:02:11BRMT3
https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRMT3.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:15:462021-04-29 17:02:11BRMT3 https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRM2.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:14:202021-04-29 17:06:59BRM2
https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRM2.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:14:202021-04-29 17:06:59BRM2 https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRM2s.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:13:242021-04-29 17:07:38BRM2S
https://www.autorotorgroup.com/wp-content/uploads/2020/09/BRM2s.jpg
389
600
Paolo
https://www.autorotorgroup.com/wp-content/uploads/2020/07/autorotor-logo.png
Paolo2020-09-17 15:13:242021-04-29 17:07:38BRM2S